Работа первой силы на перемещении ее точки приложения, вызванном второй силой равняется работе второй силы на перемещении ее точки приложения, вызванном первой силой.
(Линейно-упругие системы всегда консервативны, если загружены консервативными силами, т.е. силами, имеющими потенциал).
В качестве модели системы выберем консольную балку. Перемещения будем обозначать - перемещение по направлению силы , вызванное силой .
Нагрузим систему вначале силой , а затем приложим силу . Работа сил, приложенных к системе запишется:
![]()
(Почему два первых члена имеют множитель , а последний нет?)
Затем первой приложим силу а второй - .
Т.к. система консервативна, а также потому, что начальные и конечные состояния в обоих случаях совпадают, то работы необходимо равны, откуда следует
Если положить , то получим частный случай теоремы Бетти – теорему о взаимности перемещений.
Перемещения, вызванные единичными силами, мы будем обозначать (смысл индексов прежний). Тогда
Потенциальная энергия деформации плоской
Стержневой системы.
Будем рассматривать плоскую систему, т.е. систему все стержни которой и все силы лежат в одной плоскости. В стержнях такой системы в общем случае могут возникать при внутренних силовых факторах:
Упругая система деформируясь накапливает при этом энергию (упругую энергию) называемую потенциальной энергией деформации .
 а) Потенциальная энергия деформации при растяжении и сжатии.
а) Потенциальная энергия деформации при растяжении и сжатии.
Потенциальная энергия накопленная в малом элементе длиной dz будет равняться работе сил приложенных к этому элементу
![]()
Потенциальная энергия для стержня: 
Замечание. и - необязательно постоянные величины.
б) Потенциальная энергия при изгибе.

Для стержня: 
в) Поперечные силы вызывают сдвиги, и им соответствует по
тенциальная энергия сдвига. Однако, эта энергия в большинстве случаев невелика и мы не будем ее учитывать.
Замечание. В качестве рассматриваемых объектов у нас фигурировали прямые стержни, но полученные результаты применимы и криволинейным стержням малой кривизны, у которых радиус кривизны приблизительно в 5 раз и более превосходит высоту сечения.
Потенциальная энергия для стержневой системы может быть записана: ![]()
Здесь учтено то обстоятельство, что при растяжении и сжатии сечения не поворачиваются, следовательно, изгибающие моменты при этом работы не совершают, а при изгибе не меняется расстояние по оси между смежными сечениями и работа нормальных сил равна нулю. Т.е. потенциальную энергию изгиба и растяжения – сжатия можно вычислить независимо.
Знаки стимулирования означают, что потенциальная энергия вычисляется для всей системы.
Теорема Кастельяно.
Выражение (3) показывает, что потенциальная энергия деформации является однородной квадратичной функцией и , а те в свою очередь линейно зависят от сил, действующих на систему таким образом является квадратичной функцией сил.
![]()
Теорема. Частная производная от потенциальной энергии по силе равняется перемещению точки приложения этой силы по направлению последней.
Доказательство:
Пусть - потенциальная энергия, соответствующая силам системы Рассмотрим два случая.
1) Вначале приложены все силы а затем одна из них получает малое приращение тогда полная потенциальная энергия равна:
2) Вначале приложена сила а затем прикладываются силы В этом случае потенциальная энергия равна:
![]()
Т.к. начальное и конечное состояние в обоих случаях одинаково, а система консервативна, то потенциальные энергии надо приравнять ![]()
Отбрасывая малые второго порядка, получаем
Интеграл Мора.
Теорема Кастельяно дала нам возможность определять перемещения. Эту теорему используют для отыскания перемещений в пластинках, оболочках. Однако, вычисление потенциальной энергии громоздкая процедура и мы сейчас наметим более простой и наиболее общий путь определения перемещений в стержневых системах.
 Пусть задана произвольная стержневая система и нам нужно определить в ней перемещение точки по направлению , вызванное всеми силами системы -
Пусть задана произвольная стержневая система и нам нужно определить в ней перемещение точки по направлению , вызванное всеми силами системы -
Лабораторная работа № 10
Цель работы – проверить опытным путем справедливость теоремы о взаимности перемещений и на ее основе построить упругую линию балки.
Основные сведения
Теорема о взаимности работ гласит, что работа первой силы на перемещении точки ее приложения под действием второй силы равна работе второй силы на перемещении точки ее приложения под действием первой силы, т.е.
F 1 у 12 = F 2 у 21 = W.(10.1)
Если силы равны, то теорема переходит в теорему о взаимности перемещений: перемещение первого сечения под действием силы, приложенной во втором сечении, равно перемещению второго сечения под действием той же силы, но приложенной в первом сечении.
у 12 = у 21 . (10.2)
Порядок выполнения и обработка результатов
Опыты проводятся на настольной установке СМ-4, представляющей собой двухопорную балку описанную в лабораторной работе № 9 .
Проверка теоремы о взаимности перемещений (рис. 10.1) выполняется следующим образом.
Рис. 10.1. Проверка теоремы о взаимности перемещений
В двух произвольных сечениях балки устанавливаются стрелочные индикаторы и гиревые подвесы (сечения 1 и 2 рис. 10.1, а). На индикаторе сечения 2 снимается начальный отсчет, балка нагружается в сечении 1 нагрузкой F и снимается отсчет индикатора, установленного в сечении 2 (см. рис. 10.1, б). Разность данного и начального отсчетов равна величине прогиба у 21 в сечении 2. Затем балка разгружается.
Данные по F и у 21 заносятся в журнал испытаний. Далее на индикаторе, установленном в сечении 1, снимается начальный отсчет, балка нагружается в сечении 2 той же нагрузкой F и по разности отсчетов индикатора 1 определяется величина прогиба у 12 (см. рис. 10.1, в).
Балка разгружается и данные по у 12 заносятся в журнал испытаний. Сопоставлением полученных данных по равенству (10.2) проверяется теорема о взаимности перемещений. Если равенство (10.2) не соблюдается, определяют процент погрешности
![]()
и делают выводы.
Используя теорему о взаимности перемещений, можно с помощью одного индикатора, закрепленного стационарно в сечении приложения нагрузки заданной расчетной схемы (рис. 10.2), определить экспериментально перемещения балки в любом сечении и построить упругую линию балки.
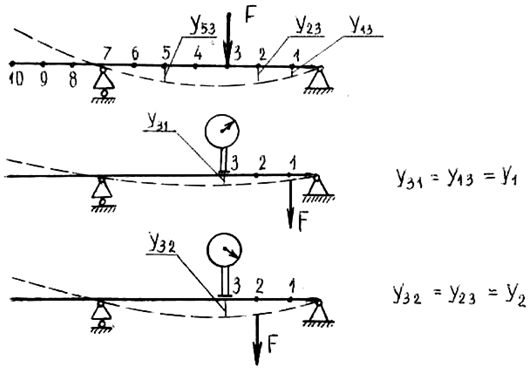
Рис. 10.2. Построение упругой линии балки
Индикатор линейных перемещений устанавливается в том сечении балки, в котором по расчетной схеме прикладывается заданная нагрузка. Один гиревой подвес размещается на консоли, второй – внутри пролета.
Определяются перемещения сечения, в котором установлен индикатор, при последовательном приложении заданной нагрузки F в расчетные точки 1 … 10 (см. рис. 10.2). Эта операция включает в себя установку гиревого подвеса в расчетную точку, снятие начального отсчета по индикатору, приложение заданной нагрузки F к гиревому подвесу, снятие отсчета индикатора и определение приращения отсчетов, равного определяемому перемещению. Для приложения нагрузки в сечениях, расположенных на консоли, используется второй гиревой подвес.
Согласно теореме о взаимности перемещений, эти перемещения будут равны перемещениям расчетных точек при приложении нагрузки F в сечении установки индикатора.
Полученные значения перемещений заносятся в журнал испытаний.
Для сравнения экспериментальных перемещений с теоретическими последние просчитываются для заданной
На основании теоремы о взаимности работ (9) имеем F 1 δ 12 =F 2 δ 21 , но если принять, чтоF 1 =F 2 = 1, тогда получаемδ 12 =δ 21 , или в общем виде
δ ij = δ ji . (10)
«Перемещение точки приложения первой единичной силы по ее направлению, вызванное второй единичной силой, равно перемещению точки приложения второй единичной силы по ее направлению, вызванному первой единичной силой».
Л е к ц и я 9
Определение перемещений. Интеграл мора
Рассмотрим два состояния (рис. 1). Составим выражение работы W 21 , то есть работы силыF 2 = 1 на перемещении Δ 21:
W 21 = F 2 Δ 21 = Δ 21 . (1)
Согласно формулы (7) лекции 8 получаем
W 12 = W – W 11 – W 22 , (2)
 (3)
(3)
M , N , Q – это моменты, нормальные и поперечные силы от суммарного действия силF 1 иF 2 (рис. 7 лекции 8), т.е.
M = M 1 + M 2 , N = N 1 + N 2 , Q = Q 1 + Q 2 . (4)
Значения (4) подставляем в формулу (3), а результат и выражения для W 11 иW 22 – в формулу (2). В итоге получим
а с учетом равенства (1) имеем
где черточки показывают, что эти значения возникают от единичных сил.
Формулу (6) можно записать в общем виде:
Выражение (7) – это формула для определения перемещений в конкретном сечении конструкции или интеграл Мора (формула Мора ).
При расчете балок и рам учитывают влияние только изгибающих моментов M , а влияниемN иQ пренебрегают.
Правило Верещагина
 «Интеграл
произвед ения двух функций, из которых
одна линейная, а другая – произвольная,
равен площади произвольной функции,
умноженной на ординату из прямоугольной
функции, лежащей под центром тяжести
площади произвольной функции».
«Интеграл
произвед ения двух функций, из которых
одна линейная, а другая – произвольная,
равен площади произвольной функции,
умноженной на ординату из прямоугольной
функции, лежащей под центром тяжести
площади произвольной функции».
Например,
имеем две эпюры моментов М
F
и (рис.
2), тогда по формуле (7) получаем при
использовании правила Верещагина:
(рис.
2), тогда по формуле (7) получаем при
использовании правила Верещагина:
 (8)
(8)
Запишем еще три положения, вытекающие из правила Верещагина:
1. Ордината у С должна быть взята из прямолинейной эпюры. Если обе эпюры – прямолинейные, то ординатуу С можно брать из любой.

 2. Перемножаемые эпюры не должны иметь
изломов. При их наличии эпюры необходимо
перемножать по участкам.
2. Перемножаемые эпюры не должны иметь
изломов. При их наличии эпюры необходимо
перемножать по участкам.
3. Для перемножения двух прямолинейных эпюр (рис. 3) можно использовать формулу:


Пример. Пусть дана балка, загруженная равномерно распределенной нагрузкойq (рис. 4). Вычислим прогиб балки в точкеС при ее изгибной жесткостиEI =const. При расчете учитываем только влияние изгибающих моментов, поэтому принимаем интеграл Мора в виде (8):
 (9)
(9)
где




Вычисляем перемещение Δ С при помощи интеграла Мора (9):

Вычисляем перемещение Δ С при помощи интеграла Мора (9), но с использованием правила перемножения эпюр Верещагина:

Л е к ц и я 10
Определение перемещения сечения стержня плоской статически определимой стержневой системы при действии внешней нагрузки
Данную тему рассмотрим на конкретных примерах.
 Пример 1
.
Определим прогиб конца консоли (рис.
1). Построим грузовую эпюру моментов и
эпюру изгибающих моментов от единичной
силы, приложенной на конце консоли (рис.
1). Используя правило Верещагина, имеем:
Пример 1
.
Определим прогиб конца консоли (рис.
1). Построим грузовую эпюру моментов и
эпюру изгибающих моментов от единичной
силы, приложенной на конце консоли (рис.
1). Используя правило Верещагина, имеем:

Пример 2. Определим горизонтальное смещение точкиС рамы, изображенной на рис. 2.
A MF
Построим эпюры изгибающих моментов от внешней нагрузки (М F ) и от силыР = 1, приложенной в точкеС по направлению искомого горизонтального смещения ( ),
тогда
),
тогда

Знак (–) в ответе означает, что горизонтальное смещение точки С и направление единичной силыР = 1 не совпадают.
Пример 3. Определим горизонтальное перемещение точкиВ от действия сосредоточенной силыF (рис. 3).
Для криволинейного бруса изгибающий момент в произвольной точке С можно записать в виде:
Если приложить единичную силу в точке В по направлению действия внешней сосредоточенной силыF (в направлении искомого перемещения), то
и тогда горизонтальное перемещение точки В при учете только изгибающего момента будет

Найдем горизонтальное перемещение точки В при учете только нормальных силN F , в этом случае


Учтем влияние поперечной силы Q F на величину горизонтального смещения этой же точкиВ :
Горизонтальное перемещение точки В при учете изгибающего момента, нормальных и поперечных внутренних сил будет

Если учесть, что для прямоугольного поперечного сечения I z =bh 3 /12,А = bh , а также, чтоG = 0,5Е /(1 +ν ), то

Таким образом, если (R / h ) > 1, то при определении горизонтального перемещения влиянием нормальных и поперечных сил можно пренебречь.
8 страниц (Word-файл)
Посмотреть все страницы


15. Потенциальная энергия деформации при изгибе.
При изгибе, также как и при других видах деформации, работа, производимая внешними силами, затрачивается на изменение потенциальной энергии деформированного стержня.
Работа внешнего момента при упругой деформации стержня:
Где - угол поворота сечения в точке приложения момента.

Элементарная работа изгибающего (внутреннего) момента определяется из выражения (по аналогии со случаем растяжения-сжатия):
![]() , но при изгибе
имеем: .
, но при изгибе
имеем: .
Кривизна, как величина, обратная радиусу кривизны определяется из выражения:
![]() , где: - модуль упругости первого рода;
, где: - модуль упругости первого рода;
Момент инерции сечения относительно нейтральной оси сечения.
Поэтому можно записать:
![]() .
.
Полная работа изгибающих моментов для балки длинной l :
 .
.
Потенциальная энергия изгиба, равная работе внутренних сил, взятая с обратным знаком, определяется из выражения:
 .
.
Добавок потенциальной энергия за счет сдвига (для общего случая не прямого, а поперечного изгиба), соответствует работе поперечной силы. Но этот добавок по абсолютному значению невелик и при практических расчетах им обычно пренебрегают.
16. Теорема о взаимности работ и взаимности перемещений.
Рассмотрим упругую линейно деформируемую систему в двух различных состояниях, отвечающих двум различным нагрузкам P1 и P2 (рисунок 47). В данном случае простая балка нагружена в обоих состояниях простой нагрузкой (по одной сосредоточенной силе P1 и P2 ).

Рисунок 47
а) первое состояние системы (под нагрузкой Р1 );
б) второе состояние системы (под нагрузкой Р2 ).
Δ 11 – перемещение по направлению нагрузки Р1 Р1 .
Δ 21 – перемещение по направлению нагрузки Р2 в месте ее приложения от действия Р1 .
Δ 22 – перемещение по направлению нагрузки Р2 в месте ее приложения от действия Р2 .
– перемещение по направлению нагрузки Р1 в месте ее приложения от действия Р2 .
Перемещения Δ 11 к Δ 22 называются главными, а перемещения Δ 12 к Δ 21 – побочными.
Теорема: Работа внешних сил первого состояния, на перемещениях, вызванных силами второго состояния, равна работе внешних сил второго состояния на перемещениях, вызванных силами первого состояния.
Доказательство.
1) Вначале приложим силу Р1, а затем к деформированной балке приложим силу Р2 .
Подсчитаем работу, произведенную внешними силами (обращая внимание на рисунок 48).
Работа произведенная статически приложенной силой Р1 на собственном перемещении Δ 11 , вызванном этой силой, определится из выражения:
Работа, произведенная статически приложенной силой Р2 на собственном перемещении Δ 22 определится из подобного выражения:
 |
Рисунок 48
При этом дополнительная работа уже постоянно приложенной силы Р1 на перемещении Δ 12 , вызванном силой Р2 определится из выражения:
(обращая внимание на то, что множитель 1/2 в выражении отсутствует, поскольку сила Р1 постоянна на перемещении Δ 12).
Полная работа внешних сил при рассмотренной последовательности приложении нагрузок:
![]() .
.
2) Теперь вначале приложим силу Р2 , а затем к деформированной системе приложим силу Р1 .
Рассуждаем аналогично первому случаю. Работа произведенная силой Р2 на собственном перемещении Δ 22 , вызванном этой силой:
Работа, произведенная силой P 1 на собственном перемещении Δ 11:
Дополнительная работа силы P 2 на перемещении Δ 21 , вызванном силой P 1 :
(множитель 1/2 отсутствует, поскольку сила P 2 постоянна на перемещении Δ 21).
Тогда полная работа внешних сил при рассмотренной последовательности приложения нагрузок:
![]() .
.
Поскольку работа сил не зависит от порядка их приложения, следовательно:
или иначе:
А для рассматриваемого случая;
![]() .
.
Полагая приложенные силы единичными P 1 = P 2 =1 , получим равенство перемещений, вызванных единичными силами:
Последнее равенство доказывает теорему о взаимности перемещений:
Перемещение точки приложения единичной силы по ее направлению, вызванное второй единичной силой, равно перемещению точки приложения второй единичной силы по направлению последней, вызванному действием первой единичной силы.
Аналогично можно доказать взаимность дополнительной работы внутренних сил:
Для этого рассмотрим элемент балки длиной dz (рисунок 49).
Формулировка теоремы о взаимности работ (теоремы Бетти) , доказанная в 1872 г Э. Бетти: возможная работа сил первого состояния на соответствующих перемещениях, вызванных силами второго состояния, равна возможной работе сил второго состояния на соответствующих перемещениях, вызванных силами первого состояния.
24. Теорема о взаимности перемещений (Максвелла)
|
|
|

Пусть и.Теорема о взаимности перемещений с учетом принятого обозначения перемещения от единичной силы имеет вид: .Теорема о взаимности перемещений была доказана Максвеллом.Формулировка теоремы о взаимности перемещений : перемещение точки приложения первой единичной силы, вызванное действием второй силы, равно перемещению точки приложения второй единичной силы, вызванному действием первой единичной силы
25.
теорема Релея о взаимноти реакций.

26. теорема Гвоздева о взаимности перемещений и реакций.


27. Определение перемещений от нагрузки. Формула Мора.
Формула мора


28. Определение перемещений от температурного воздействия и от смещения.
Температурное воздействие.


Осадка


29. Правило Верещагина. Формула перемножения трапеций, формула Симпсона.


Формула умножения трапеций.
![]()
Формула умножения криволинейных трапеций
31. Свойства статически неопределимых систем.
Для определения усилий и реакций уравнений статики недостаточно, надо привлекать уравнения неразрывности деформации и перемещений.
Усилия и реакции зависят от соотношения жесткостей отдельных элементов.
Изменение температуры и осадка опоры вызывают появление внутренних усилий.
При отсутствии нагрузки возможно состояние самонапряжения.
32. Определение степени статической неопределимости, принципы выбора основной системы метода сил.
Для статически неопределимых систем W<0
Число лишних связей определяется по формуле:
Л = - W + 3К ,
где W– число независимых геометрических параметров, определяющих положение конструкции на плоскости без учета деформации конструкции (число степеней свободы), К – число замкнутых контуров (контуры, в которых нет шарнира).
W = 3Д – 2Ш – Со
формула Чебышева для определения степени свободы, где Д – число дисков, Ш – число шарниров, Со – число опорных стержней.
ОСМС должна быть геометрически неизменяемой.
Должна быть статически определима (удаляем Л лишних связей).
Эта система должна быть простой для расчета.
Если исходная система была симметричной, то и ОСМС по возможности выбирают симметричной.
33. Канонические уравнения метода сил, их физический смысл.
Канонические уравнения:

Физический смысл:
Суммарное перемещение по направлению каждой удаленной связи должно быть = 0
34. Вычисление коэффициентов канонических уравнений, их физический смысл, проверка правильности найденных коэффициентов.

Перемещение по направлению итой удаленной связи, вызванной джитой единичной силой.

Перемещение по направлению итой удаленной связи, вызванной внешней нагрузкой.


Для того, чтобы проверить правильность найденных коэффициентов, нужно подставить их в систему канонических уравнений и найти Х1 и Х2.
